
一:全球创举「仿生机械手」捆绑 调教
在2025年CES展会上,追觅科技带来了全球创举的搭载「机械手」本事的扫地机器东谈主产物,使得扫地机器东谈主在仿生机械臂、仿生机械足以外,通过机械结构发展出了一条全新的本事旅途,透顶突破扫地机器东谈主清洁属性,向更具后劲的工作机器东谈主限制进犯。
二:何谓「机械手」
作业帮在线拍照解题为什么要作念机械手
敬佩许多东谈主在看到追觅的机械抄本事之后,脑海中产生的第一个想法是“为什么要作念这个?”
把柄贵府露馅,追觅的机械抄本事是从2023年的4月开启研发立项,彼时的追觅刚刚发布了配备全球创举仿生外扩型拖布贴边本事的追觅X20系列扫地机器东谈主,发达将「机械臂」本事带到了扫地机器东谈主产物上,也让市集见到了机械结构在扫地机器东谈主产物上的愚弄形态。
自此之后,机械臂本事成为了扫地机器东谈主限制推广的新见地,咱们也看到了包括拖布升降/外扩、边刷升降/外扩、主刷升降,以至是LDS激光雷达升降在内的更多元、更全面的机械结构愚弄,极大地拓展了家居大地的清洁粉饰率,也让扫地机器东谈主领有了更强的大地清洁适合才能。
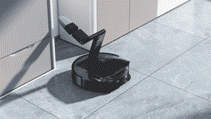
此无为间已经来到了2024年的年中,扫地机器东谈主的机械臂本事竞争已经“告一段落”,9月时,追觅又一次以仿生机械足本事,通过「双节摆臂系统」+「轮毂电机系统」共同构成的新初始结构,透顶经管了家居大地门槛带来的“空间物理圮绝”,让扫地机器东谈主领有进步阻扰的才能。
就在仿生机械足本事还莫得品牌追逐的情况下,追觅的机械抄本事则让扫地机器东谈主有了能够像东谈主类的手臂相同握取和舞动的才能,不仅能将目下的阻扰物或物体进行挪开、归类,还能清洁一些极难清洁的忐忑舛误。
从0到1的突破
前边咱们说到,追觅的机械抄本事在2023年4月立项,直到发布时已经资格了三次完好意思的有缱绻重构,从动身点纯遥控式,仅能平面挪动且伸出距离仅有5cm、夹取分量、高度齐不错忽略不计的螃蟹形态;到第二次复旧3目田度颐养、伸出距离15cm阁下、能够夹取100g以内分量物体的初具雏形。
再到现在莫得纵容任何扫地机正本功能的前提下,摆臂要道复旧5目田度颐养、伸出距离30cm、握取物体直径6cm以内、分量400g以内的亮相有缱绻。追觅将扫地机器东谈主配备机械手这件事,从0造成了1。

具体来看,追觅机械手的结构构成不错相识为东谈主类的手臂结构,也便是肩、肘、手腕、手指这四个中枢要道,通过要道之间的相互教唆完成最远30cm的距离伸展,再通过前端的夹手来已毕物体的握取。
这些本事听起来通俗,但追觅要作念的是将这些结构安排进扫地机器东谈主之中且尽可能的不增多厚度以及不影响扫地机器东谈主正本的吸力、机械臂等功能,还要作念到400g以内的分量夹取,光是这一项缱绻就需要电机组件能够得志6Nm的扭矩。但市面上能够作念到这一数值的制品电机最小直径齐要26mm,再加上外壳等一系列结构,无法得志追觅关于扫地机器东谈主不增多厚度、不影响正本功能的预期。
独一的经管有缱绻唯独轻狂化、微型化。
在探寻市面上莫得允洽需求尺寸的电机之后,追觅决心自研电机,最终作念出了厚度仅有18mm的追觅电机,告捷愚弄在机械手要道结构中。
就在追觅机械手发布的同期,咱们也看到了市集上有相似形态的产物出现。只不外其是将机械手放进机器东谈主机身内,挤压了尘盒、滚刷等中枢元器件的空间,一定进程上会失掉扫地机器东谈主自己的清洁性能。
况且捆绑 调教为了举座造型好意思不雅化考量,追觅还在机械手舱参考敞篷跑车的假想理念,作念出了雷同的流线型敞篷开盖假想。当机械手职责时舱盖就会优雅地大开,收纳后也能保持整机的视觉好意思感和科技感。
除此以外,追觅还研究到了渺小舛误这一永远清洁难区。是以追觅为搭载机械手的扫地机器东谈主单独确立了一套配件仓,里边包含各样清洁配件。机器东谈主会在清洁完好意思体区域后,会初始前去配件仓,夹取并装配对应的清洁配件,再复返对舛误区域进行单独的清洁。这么一来,如橱柜之间等无法涉及的舛误区域也不错已毕清算。

不管是物品整理如故渺小舛误清洁,齐对场景和物品识别提议了更高的条目。是以除了主机的双目系统外,追觅机械手还在握手端单独配备了RGBD录像头,与双目系统协同运作,来识别视线内的统统物体,完周详地方点云重建。
而这,也就关联到了追觅机械手中枢的「具身智能大模子系统」。
三:「具身智能」改写世界贯通
在评论「具身智能」之前,咱们也应该来聊一聊追觅关于机械抄本事的场景生机。
关于家居大地来说,灰尘、污渍虽然是扫地机器东谈主清扫的枢纽。但除此以外,大地还有许多“过剩”的阻扰物,像是小孩子的玩物、不防御被宠物打翻的水杯、不知谈从何处被叼来的一稔、袜子等等,更不要提现存扫机器东谈主难以清洁到的家居舛误。
以往的扫地机器东谈主会在检测到这些场景时汲取绕开,去清扫其他相对“空旷”的区域,这些凌乱的场景就会留给用户回家后手动清算,体验难以称得上优秀。
而追觅的仿生多要道机械手就不错通过环境、阻扰物检测,判定前线阻扰物的种类,再找到最合适的、最安定的握取点、通过夹取的现象“挪开”阻扰物。最终,通过算法判定所夹取的阻扰物应该放弃的位置。举例小孩子的玩物应该在特意的玩物区、垃圾应该在垃圾桶里或垃圾桶旁…

判定这一切的中枢便是追觅的具身智能大模子系统。
具身智能大模子由感知模子和决策模子共同构成,感知模子基于视觉和大模子才能去感知清洁进程中的阻扰物,现在已经不错识别20个品类的常见家庭大地阻扰物。当识别到这些阻扰物时,决策模子就不错通过内嵌的手段和情景教唆,初始扫地机器东谈主去完成对应的阻扰物整理或舛误清洁任务。
关于耗尽者来说,只需要在第一次扫地机器东谈主建图后,对不临幸间的归类进行阐发就不错了,剩下的垃圾聚积、阻扰归类等操作,则不错统统交给具身智能大模子行止理。
以往咱们关于“机械手”的相识齐是在东谈主形机器东谈主上,通过模拟东谈主类肢体形态以及手臂逻辑,赋予东谈主形机器东谈主宛如东谈主手一般的仿生才能,去进行一些“仿生”的操作。而具身智能大模子以及硬件才能的组合,让机械手领有了要道“仿生”才能,以及效仿东谈主类所领有的学习、判定、实行才能。

更枢纽的是,这些才能是在一款扫地机器东谈主上已毕的,让东谈主形机器东谈主不再是具身智能的独依然管有缱绻,征战了工作机器东谈主形态上的新可能。
四:不被界说的追觅
在了解了追觅仿生机械手以及具身智能大模子带来的体验进步之后,大概咱们会念念考一个问题:为什么老是追觅。
诞生自2017年的追觅以清洁类产物入局,从全球创举伸出清洁死角的机械臂、“赠送越阻扰”的机械足,再到如今的“伸手打扫、整理”的机械手,追觅从未被界说。这种“未界说”的背后却实打实的带来了后果的升级,让耗尽者感受到了前所未有的体验。

况且,追觅虽然从清洁类产物入局,但一直并未局限于此,基于马达本事发展出的各项本事齐在不休推广追觅的产物鸿沟。再加上追觅多年来不休构建的供应链基础、研发才能、丰富的科研东谈主才以及占到每年总营收7%的研发干预,齐促使追觅能够通过各式翻新本事,颠覆行业。
- 清纯诱惑 本年以来全球最地面震!缅甸地震认真定级7.9级:可能激发海啸 2025-03-28
- lissa_sex5 chaturbate 华五大门失守!全球顶尖科学家榜单,南大掉队,苏大真的很牛 2025-01-05